Local Readjustment for High-Resolution 3D Reconstruction
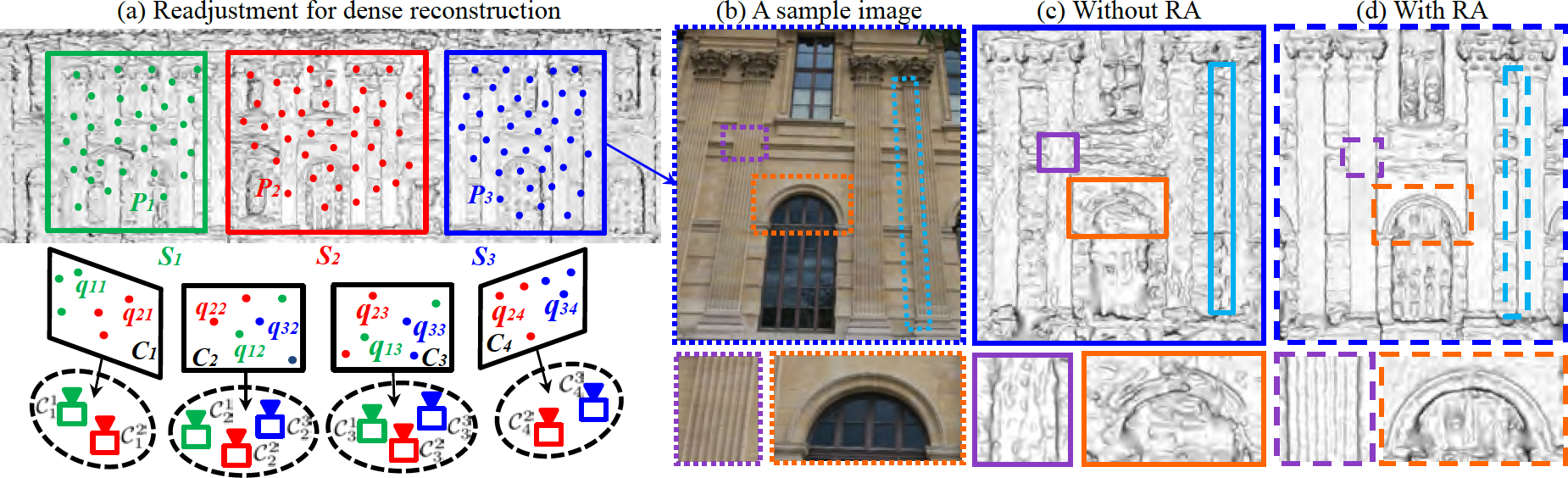
Taking SfM points and camera poses as inputs, we first decompose the points into segments, and then re-optimize each individual segment and its corresponding local cameras. This significantly improves the reconstruction quality for fine geometry details.
Abstract
Global bundle adjustment usually converges to a nonzero residual and produces sub-optimal camera poses for local areas, which leads to loss of details for highresolution reconstruction. Instead of trying harder to optimize everything globally, we argue that we should live with the non-zero residual and adapt the camera poses to local areas. To this end, we propose a segment-based approach to readjust the camera poses locally and improve the reconstruction for fine geometry details. The key idea is to partition the globally optimized structure from motion points into well-conditioned segments for re-optimization, reconstruct their geometry individually, and fuse everything back into a consistent global model. This significantly reduces severe propagated errors and estimation biases caused by the initial global adjustment. The results on several datasets demonstrate that this approach can significantly improve the reconstruction accuracy, while maintaining the consistency of the 3D structure between segments.
Paper
-
S. Zhu, T. Fang, J. Xiao and L. Quan
Local Readjustment for High-Resolution 3D Reconstruction.
Proceedings of 27th IEEE Conference on Computer Vision and Pattern Recognition (CVPR2014)